

产品描述
实验目的
探究杠杆的平衡条件。
实验原理
杠杆的平衡条件:动力×动力臂=阻力×阻力臂。
实验器材
杠杆套件、力传感器、槽码组、数据采集器、数据线、乐百仕数字化软件和计算机。
实验步骤
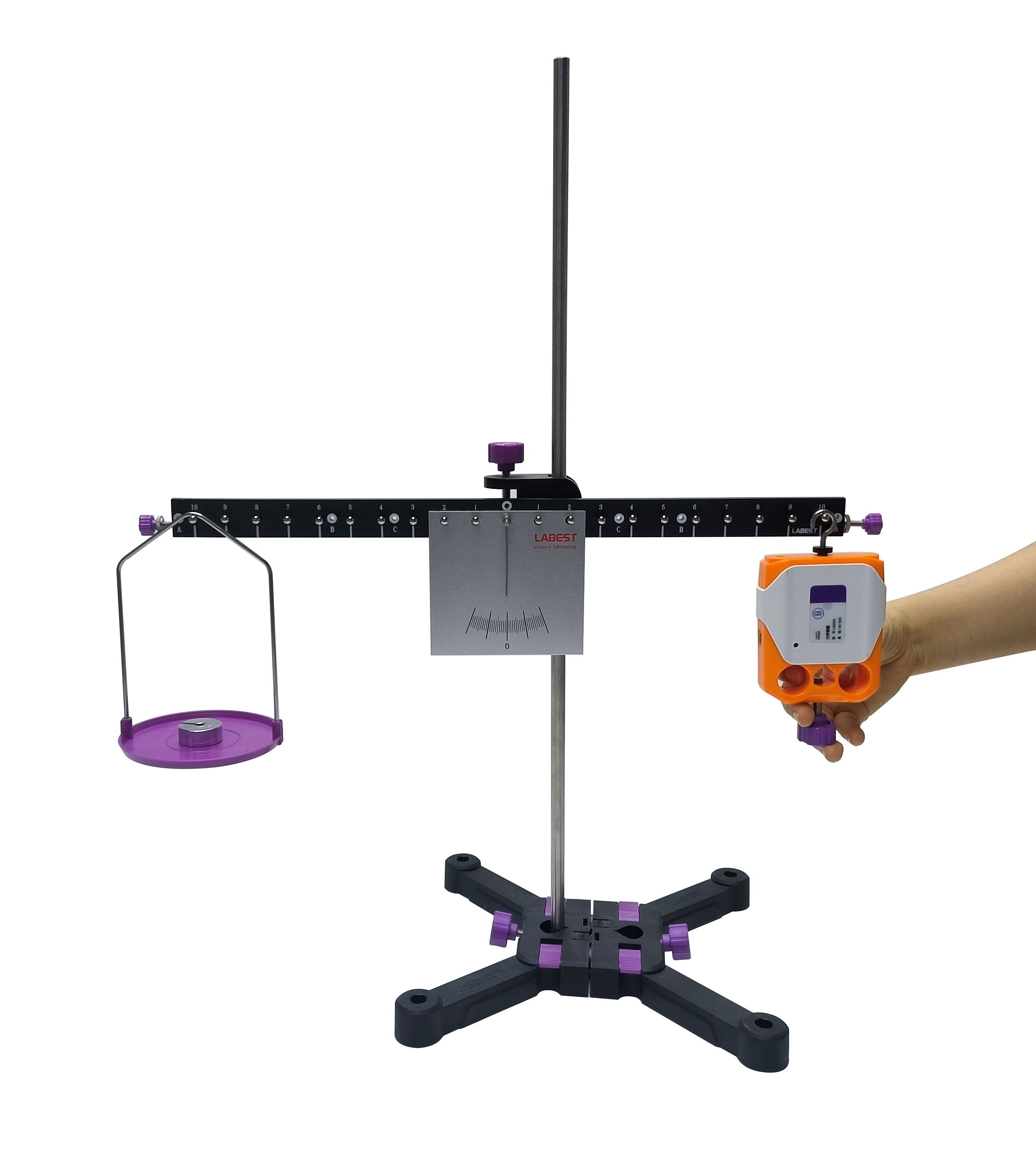
图1 实验装置图
1、按图搭建实验装置,调节杠杆两边的螺丝,使杠杆平衡。
2、用Type-C将力传感器与数据采集器连接,用USB转方口线将数据采集器与计算机相连,打开乐百仕数字化软件,依次插入列,列名称为G,单位为N,说明为槽码重力(包括槽码钩);列名称为L1,单位为m,说明为阻力臂;列名称为L2,单位为m,说明为动力臂;列名称为M1,说明为阻力,一列名称为M2,说明为动力。
3、对力传感器进行调零,点击手动采集,将100g槽码和槽码钩挂到7cm位置,另一边用力传感器勾住5cm位置,保持杠杆平衡,点击记点,记录一组数据。
4、依次改变力传感器的位置,依次为6cm、7cm、8cm和9cm位置,保持杠杆平衡,记录多组数据,如下图,得出杠杆的平衡条件:动力×动力臂 = 阻力×阻力臂。

图2 实验数据图
相关下载
在线留言


Copyright © 2022 江苏乐百仕教育科技有限公司 地址:南京市建邺区双闸路98号海峡云谷科技园2栋 电话:025-58769595 网址:www.jslabest.com
ICP备案号:苏ICP备2020054929号-1 网站建设:中企动力南京 SEO